01
Insect Navigation
Studying how insects such as honeybees perform navigation using mechanisms like path integration, visual memory, and optic flow—and how they adapt to environmental changes and challenges.

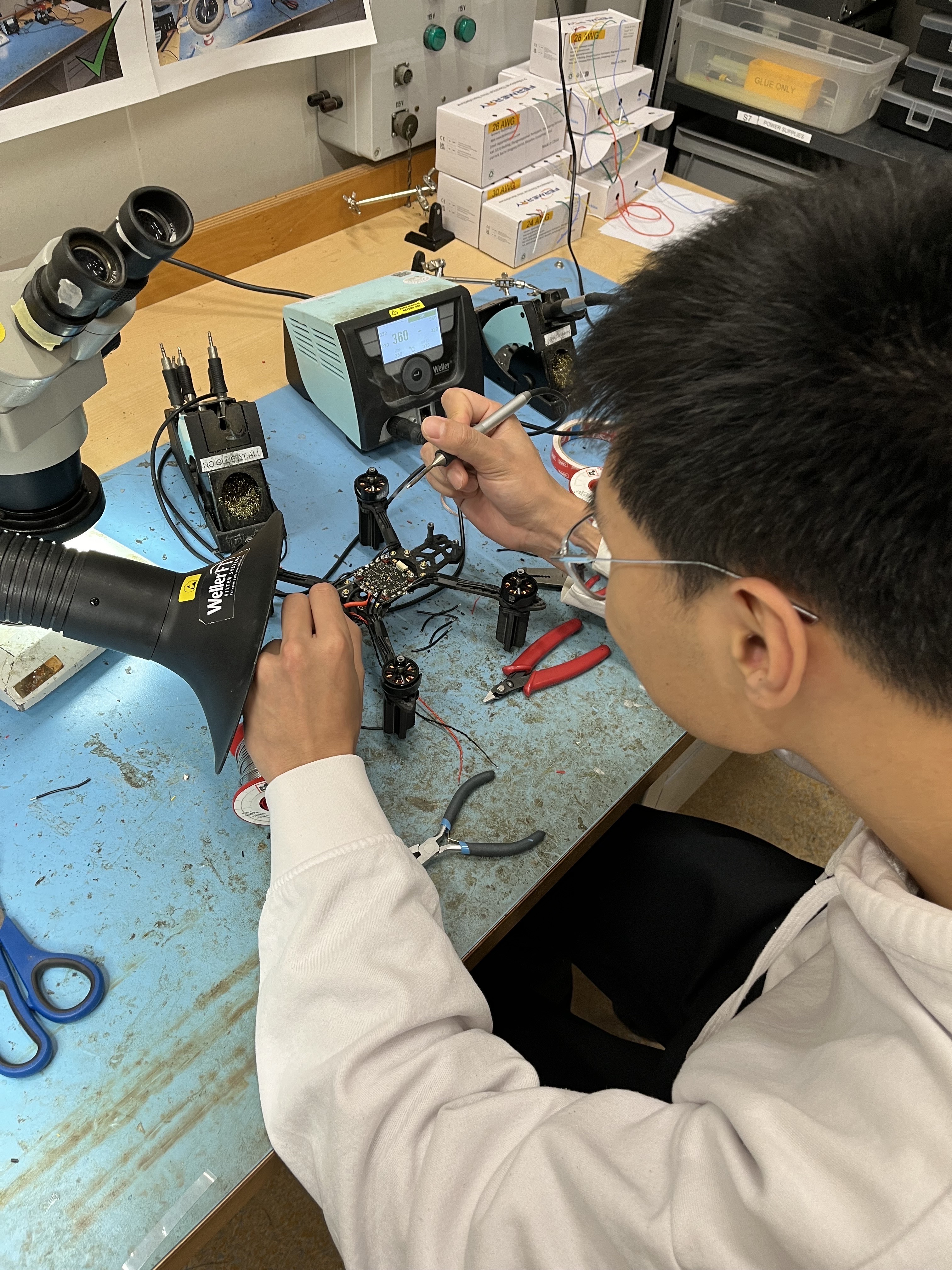
I'm a PhD student and robotics engineer studying how insects navigate — and teaching my small flying robots to do the same.
MAVLab · TU Delft · The Netherlands
I'm a second-year PhD student at the Micro Air Vehicle Laboratory (MAVLab) at TU Delft, supervised by Prof. Guido de Croon and Dr. Christophe De Wagter.
My research focuses on studying how insects such as bees and wasps navigate over long distances through their tiny brains. I translate these biological strategies into lightweight algorithms using neural networks for autonomous flying robots — enabling robust long-range navigation without heavy computation or GPS.
I also work on neuromorphic AI — using event-based cameras and neuromorphic chips to build efficient, brain-inspired perception systems for resource-constrained aerial platforms.
Insects such as honeybees navigate kilometers away from their nests to forage, visit multiple locations, return home with precision, and communicate with their mates via the waggle dance—all using tiny brains with only one million neurons. My work focuses on studying these strategies and translating them into algorithms that enable small flying robots to navigate robustly, safely, and efficiently without GPS.
Studying how insects such as honeybees perform navigation using mechanisms like path integration, visual memory, and optic flow—and how they adapt to environmental changes and challenges.
Developing lightweight navigation methods for flying robots, utilizing artificial neural networks inspired by the biological mechanisms of insect navigation.
Exploring event-based vision and neuromorphic chip deployment for efficient, brain-inspired perception on resource-constrained aerial platforms — asynchronous, low-power, and real-time.
I was born in a beautiful countryside town in Hunan, China, in October 2001, and grew up in Guangzhou. At 16, I moved to Langley (near Vancouver), Canada, for high school. In 2019, I came to the Netherlands for university—and I’ve happily been "stuck" here ever since!
Outside of research, you'll probably find me on a basketball court, on a ski slope, or out for a run along the Delft canals.






Happy to chat about research, collaborations, or anything about insect navigation and robotics.